ガバナー諸君、つい先日ぶりの糸山です。
五月の末に発売されて以降、既に多くの「ヴェローチェ」が我々の下から飛び立ち、以降はほぼ毎日、皆さんの元で建造され、組み換えられ、そして進化していく姿を目にしてきました…。
そして今日はそんなヴェローチェのカスタム機体である「レヴァンテ」のご予約締め切り日!
そんな本日にお届けするブログはヴェローチェ/レヴァンテのデザインを手掛けてくれたLAS91214氏からのお手紙“デザイン・ストーリー”です!
(本来は外部に出る事無く記録のみ残される予定であった「機構試作モデル」の画像を発掘してまいりましたので、併せてお楽しみ下さい☆)
LAS91214氏による「ヴェローチェ」デザイン・ストーリー
ガバナーの皆さん、こんにちは。
まずは糸山Pとヘキサギアチームの皆さんのご協力に感謝を。
私とヘキサギアチームの提携は突然のファーストコンタクトを機に何年も前に始まりました。
① BMIインタフェースによる制御とし、コックピットシェル内でガバナーをできるだけ横にする事で汎用性の高いコンパクトな構造とする事。

糸山注:試作モデルコックピット周辺。ボリューム感は近いが水平に、前後に長くなる配置としていた
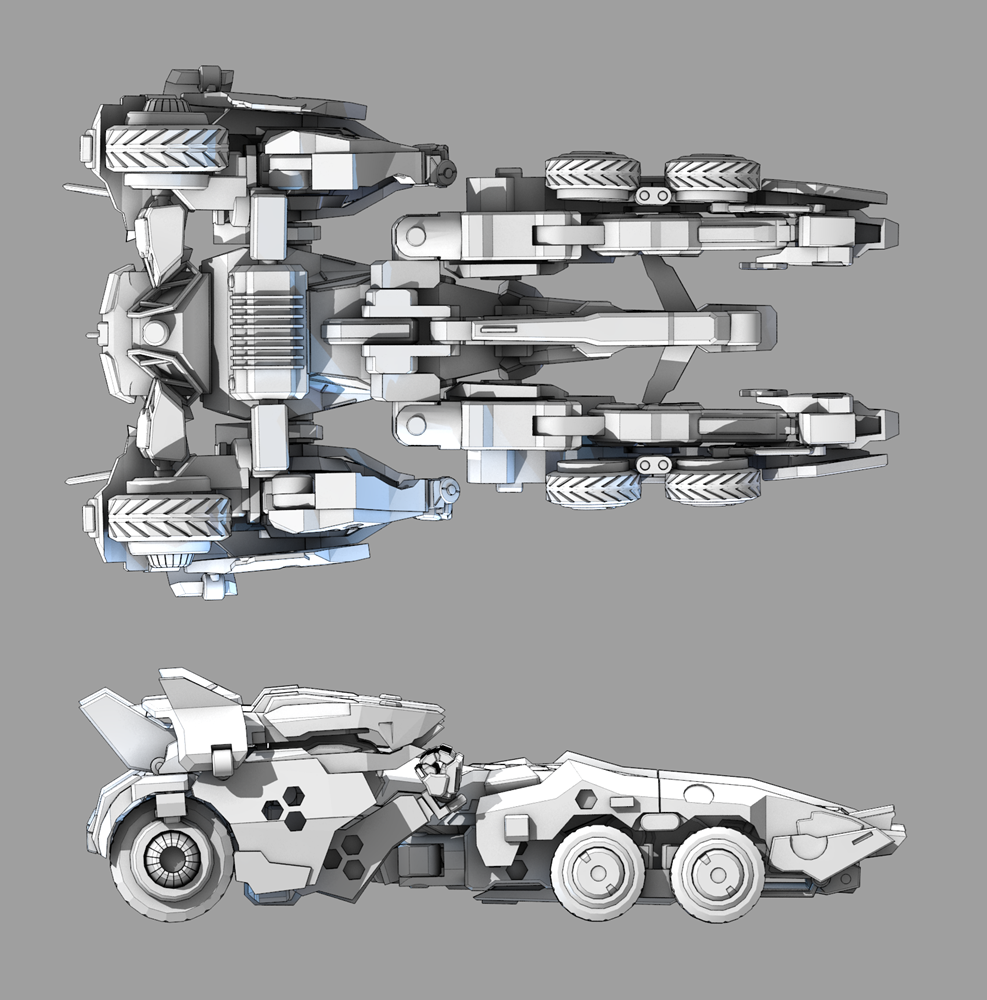
② 簡単な変形で車両を形成することができ、外装ユニットを交換することによって航空機型に換装することができる事


糸山注:試作モデル2態。この段階では基本フレームに車両パーツ/航空機パーツを換装する事でそれぞれの機能、形態を実装する構成
③ ユーザーが改造しやすい骨格構造を持っている事
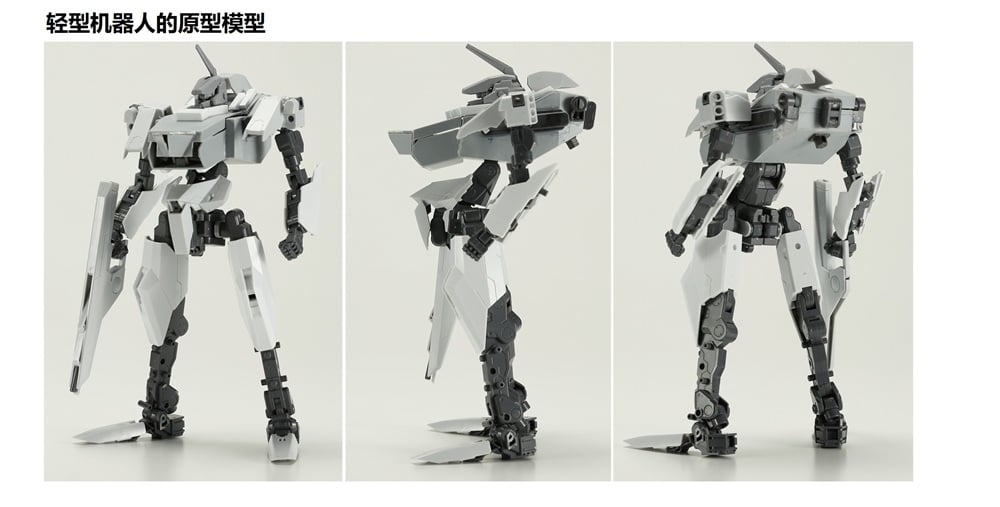
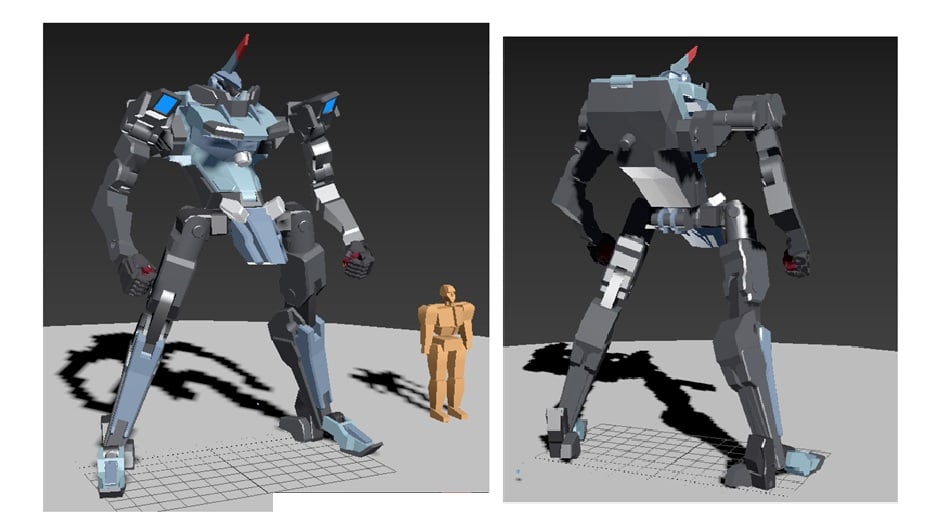
糸山注:試作モデルフレーム状態。頭部は簡易設計⇒3Dプリント、コックピットはプラバン箱組み、手足はM.S.Gのガルダギアベルーガを主とした組み換えによって構築されている
この時点で糸山Pから提示された構造試作モデルは頭部に突出したブレードアンテナがあり……
私が過去に制作したメカデザインの代表作といえば、それは私個人が著作権を持っているコミック作品の主人公機体です。“私らしさ”を盛り込む手段として、その構造を基にヘキサギアとしてのアレンジを加えるという方法論は基本的には問題ないかもしれません。
しかし、私はそれではガバナー達をごまかしている事と同義だと考えました。



糸山注:ヴェローチェ三形態。初期のカラーリングで配されているのは名機“バルクアーム・グランツ”に倣ったカラースキームだった
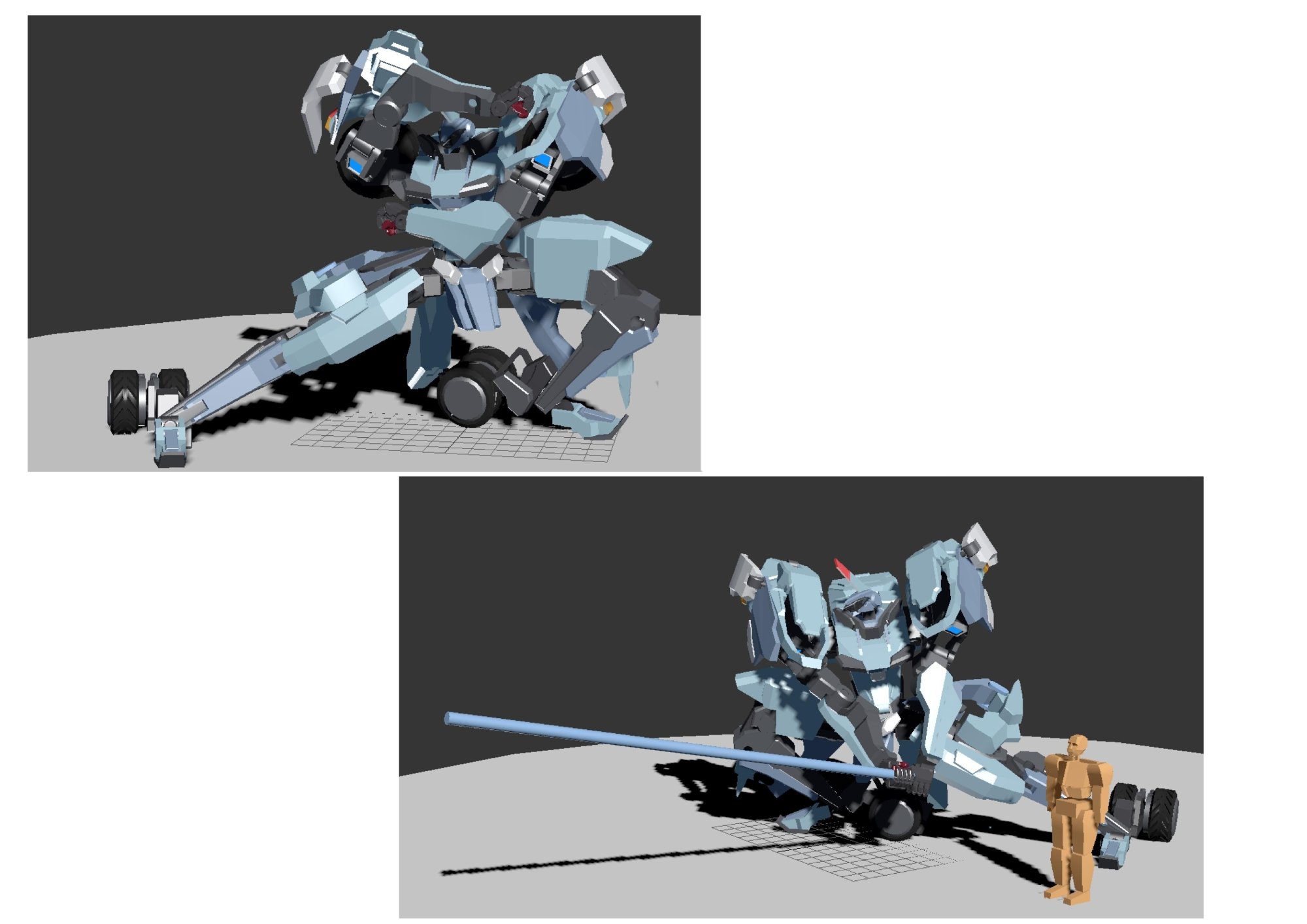
私の過去作に於いては、コスト面やユーザーの使い勝手を考慮して変形機構はシンプルに……本質的には【地面に座った姿勢で両足を伸ばし、そこにレーシングカーの蓋をして車であるかのように見せかける】という構造でした。この“蓋”にはコックピットのように見えるオレンジ色の部分があり、見る者に“視覚的に”そうであると認識してもらうことができました。
「VELOCE」では、その「コックピットを装った部分」に実際にガバナーを搭乗させる必要が有るため、各形態時のコックピットと搭乗姿勢が常に自然な確度を維持できる様に外観や可変構造のデザインの中にキャビンをF 1マシンのように配置するプランを採用しています。
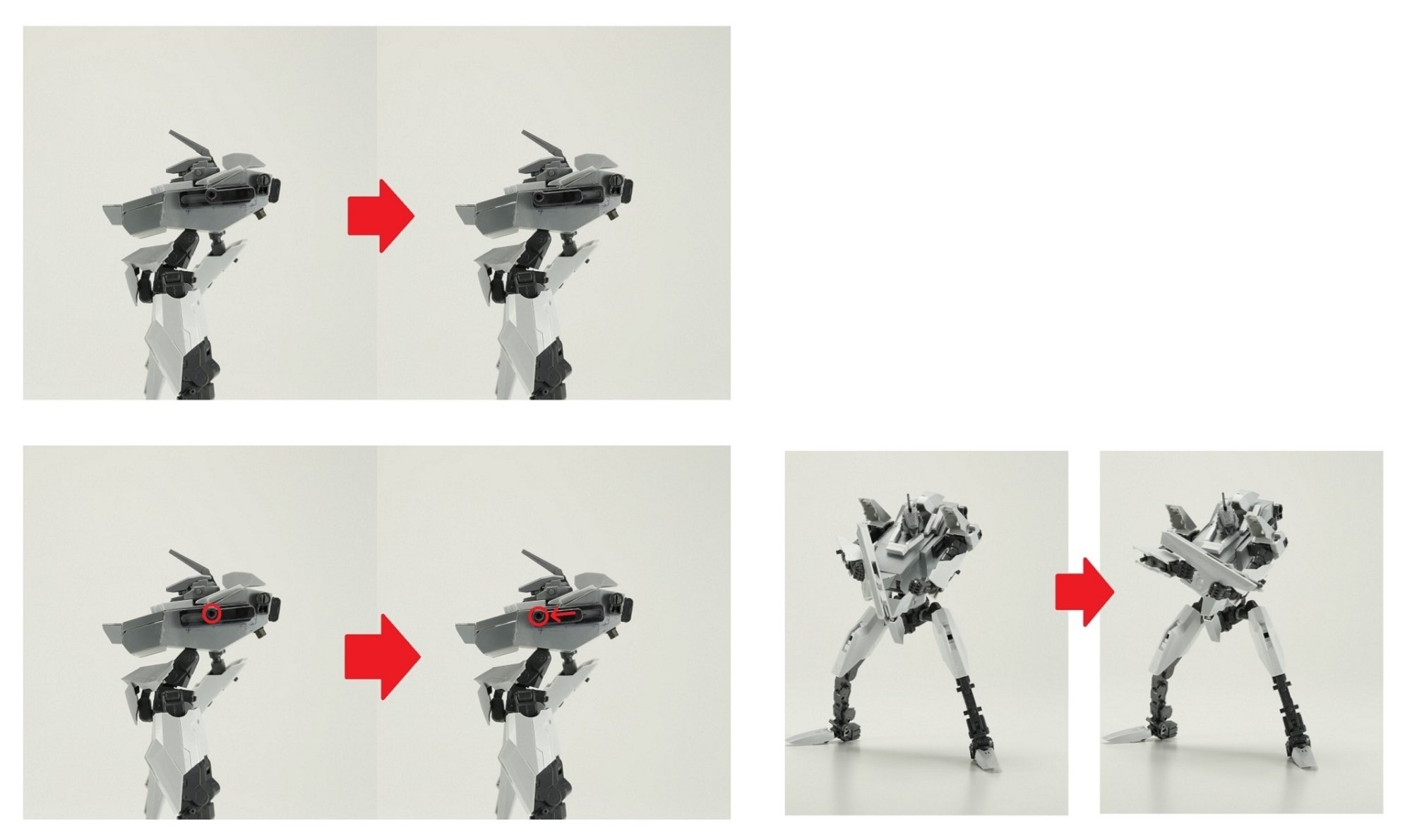
ビークルモードではヒューマノイドモードの要素を徹底的に隠したかったので、胸部ユニットを丸ごと可動構造としてビークルモードでは車体の後方に回転させ、それによって本来コックピットが露出する構造としたのですが、この構造はヒューマノイドモードでのポージングにも大いに役立ちます。

糸山注:比較的初期の記録画像より、コックピット上での胸部ユニットの遷移の検証画像
しかし、人型の構造はただ寝かせるだけの変形では変形後の車体が前後に異様に長くなってしまいます。従来は太腿部を折りたたむことで脚部を短縮し全長を変化させていましたが、そのシステムで対応可能な長さの変更には限界があります。

糸山注:試作モデルの変形(フレーム状態)。この段階では両脚の間を埋める構造も存在していない
この課題に対して「VELOCE」では股関節部分に脚部全体を直接機体の脇の下に移動させることができるジグザグの折りたたみ構造を採用する事でヴィークルモードのみならずインターセプターモードへの変形を行う際にも機体全体をコンパクトに変形させる事に成功しています。
糸山注:
裏面:中央に見える機構が“車両”としての絶妙な比率バランスを実現
一方、特徴的な肩関節は糸山Pの初期案ではスライド機構を使って肩の位置を変える方法を提案されました。この構造は直観的に遊ぶことが可能ですが、これまでの経験からプラモデルで大型のユニットをスライド可動させた場合、部品が摩耗したり脱落したりする可能性があると考えました。
糸山注:試作モデルのスライド構造。変形のための機構であると同時に、前後に長い胴体を超えて両手で武器を構える為のギミックでもあった
そこで、追加のアームによるクランク機構を使って腕の付け根そのものを前後に動かすことを提案しました。
「VELOCE」の腕部はコックピットに直接取り付けられているのではなく、肩関節はコックピット側面で縦方向に360度遷移できる構造を持ち、その中で位置決めの凸部によって変形時の位置固定がしやすいようになっています。
この凸部は切り取る事でポーズを取ったときに追加の可動幅を提供することができ、veloceが背中に手を伸ばしてかゆみをかくのも問題ありません。実はこれは私独自のインスピレーションではなく、バルクアームαやλの肩関節構造と類似させる事でそれらの「開発情報を継承した」という設定的なイメージも兼ねたデザインとなっています。

“肩”といえば「VELOCE」のデザイン全体の中でも特に強烈なエッセンスとなる部分である肩部装甲が有りますが、デザインの最終完成形では過去に設計されたロボットデザインとの類似を避けるために「後輪/推進器を肩装甲の中に隠す」という案が採用されています。
肩部装甲全体と機体の肩関節は完全に分離され、独立したロボットアームによって可動性が提供される。
この独特な構造にはいくつかの利点がありますが、その最たるものは大幅な動作を行う際に肩甲と肩を別々に調整することができるという点です。
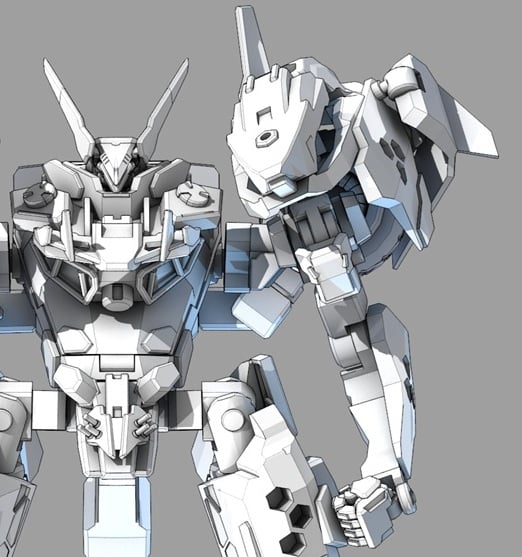
レヴァンテ肩~腕部
一見すると腕部の可動の起点となる肩関節は肩部装甲によって完全に覆われています。しかし、何らかのポージングを行おうと考えた場合、「VELOCE」は【従来のロボットが人体の構造を模倣する方法】に従って自分の腕を調整する必要はありません。
純然たる機械として、それぞれの位置を動かして手が目標に届くようにするだけでいいのです。
糸山注:初期の可動検証画像。“取りたいポーズ”が必要な機構を産み出す
同様の構造は実は機体の胸部ブロックにも応用されており、胸部ブロック全体が一つの作動肢となっています。胸部が突出している機体である「VELOCE」が胸の前で腕部を交差を抱く動作をするにはどうすればよいでしょうか。現実の女性のように「腕を使うと自然と胸を持ち上げる」だけでいいのです。(VELOCEの胸のモジュールを左右に振って動画にしている夢を見たことがありますw)
最後に。最初の出会いから本文の執筆までに、私はHEXAGEARシリーズ糸山PとHEXAGEAR TEAMの強力な支援を得ることができました。糸山Pは鋭い洞察力と卓越したアイデアで「VELOCE」の開発に貴重なアドバイスを提供し、私は探索の道で霧をかき分け、前進の方向を明確にすることができました。HEXAGEAR TEAMは、専門的な技術力と厳格な仕事ぶりで「VELOCE」を“キットブロック”として世に送り出してくれました。
私は彼らの発掘と支持に感謝し、これからもこの分野で成長していこうと思います。
HEXAGEARはこうして関わる以前から好きだったモデルシリーズで、今回初めてデザイナーとして参加しました。私が勉強しなければならない部分はまだたくさんあります。これからもっと面白いデザインを提供していきます。ありがとう!

次にリリースとなるヴェローチェ改“レヴァンテ”の最終稿。この段階では一部配色が異なるので製品画像と比較して探してみるのも一興
あとがき
以上、LAS91214氏からのメッセージでした!
いやはや、礼を言わねばならないのはこちらですよ……文面からも伝わってくる通り常に真摯にデザインを通して「製品で遊ぶユーザー」を思う姿からは、我々の方こそ多くを学ばせてもらい、共に成長させてもらい、何より魅力的なデザインとギミックで楽しませてもらっています!
ガバナー諸君!
先日の静岡ホビーショーで初公開となった「新型ディフィニッションアーマー(仮)」も開発進行中でますます目が離せない“LAS式ヘキサギア”!
今後とも宜しくお願い致します!!
それではまた!